Konfigurace vstupů a výstupů na cílových platformách
Uživatelská příručka
4.7.2025
Plzeň
Obsah
2 Fyzická připojení
2.1 WAGO PFC100/200
2.2 Raspberry Pi
2.3 Monarco HAT
2.4 REX M527, Unipi Patron/Axon/Neuron
2.5 Weidmüller u-OS PLC (WL2000, M3000, M4000)
3 Přidání vstupů a výstupů do projektu
4 Práce se vstupními a výstupními signály
4.1 Obecné kroky pro všechny platformy
4.2 Specifické parametry pro jednotlivé platformy
4.2.1 WAGO PFC100/200
4.2.2 Raspberry Pi
4.2.3 Monarco HAT
4.2.4 REX M527, Unipi Patron/Axon/Neuron
4.2.5 Weidmüller u-OS PLC (WL2000, M3000, M4000)
5 Interakce s algoritmem
6 Aktualizace HMI
7 Příklady
8 Další kroky
Kapitola 1
Úvod
Pro demonstraci konfigurace vstupů a výstupů na různých platformách využijeme projekt vytvořený v uživatelské příručce [1] a budeme v něm pokračovat. Dosud algoritmus neinteragoval s vnějším světem, nebyl připojen k žádnému fyzickému signálu ani externím datům. Nyní budeme používat vstupní a výstupní signály platformy pro interakci se skutečným světem. Pro Raspberry Pi použijeme GPIO piny, které mohou být nakonfigurovány jako vstupy nebo výstupy.
Jako vstupy budou použity dva fyzické spínače a softwarový časovač bude řídit jeden výstupní signál. Jinými slovy, tato příručka je věnována přechodu od obecného příkladu 0101-01 k výchozímu projektu pro každou platformu ukázaném v [2].
Kapitola 2
Fyzická připojení
Tato část postupu je pro každé cílové zařízení individuální. Přejděte na sekci určenou pro vaši platformu a po zapojení pokračujte Kapitolou 3.
2.1 WAGO PFC100/200
Pro tento ukázkový projekt se předpokládá následující jednoduchá sestava:
- 1x 750-8102 PFC100 nebo 750-8202 PFC200 řadič s napájením
- 1x 750-430 modul (8 digitálních vstupů)
- 1x 750-603 modul (24V potenciálová distribuce)
- 1x 750-530 modul (8 digitálních výstupů)
- 1x 750-604 modul (0V potenciálová distribuce)
- 1x 750-600 povinný koncový modul
Připojte spínače a externí relé, jak je znázorněno níže. Relé je volitelné, jelikož stav výstupu indikuje i vestavěná LED modulu.
DŮLEŽITÉ: Upozorňujeme, že číslování terminálů na modulech WAGO (výše) se neshoduje s číslováním kanálů (níže)! Vždy používejte označení DI1..8, DO1..8, AI1..4 atd. podle dokumentace WAGO.
Pro podrobnosti a příklady zapojení pro platformu se podívejte do dokumentace modulu I/O systému WAGO 750/753.
2.2 Raspberry Pi
Připojte spínače, ochranné odpory (330 Ohm) a indikátor LED, jak je znázorněno níže.
2.3 Monarco HAT
Připojte spínače, jak je znázorněno níže. Motor je volitelný, jelikož stav výstupu indikuje i vestavěná LED.
2.4 REX M527, Unipi Patron/Axon/Neuron
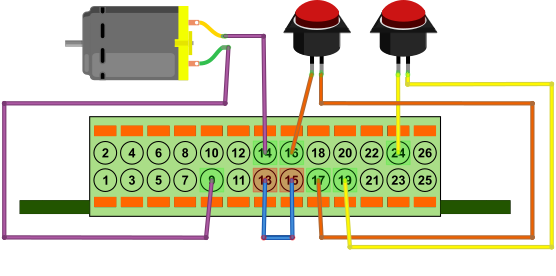
Připojte spínače, jak je znázorněno níže. Motor je volitelný, jelikož stav výstupu indikuje i vestavěná LED.
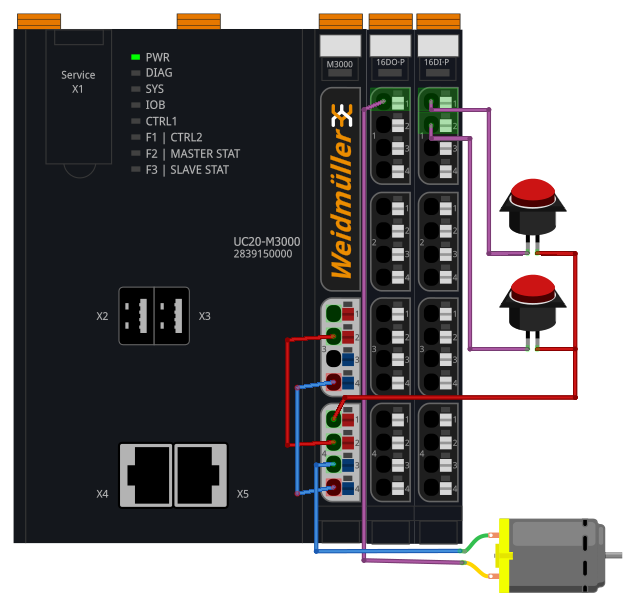
2.5 Weidmüller u-OS PLC (WL2000, M3000, M4000)
Připojte spínače, jak je znázorněno níže. Motor je volitelný, jelikož stav výstupu indikuje i vestavěná LED.
Kapitola 3
Přidání vstupů a výstupů do projektu
Nyní, když máme všechno zapojené, je čas zahrnout fyzické signály do algoritmu. Je třeba rozšířit hlavní soubor projektu o další funkční blok pro přístup k vstupům a výstupům z řídicího algoritmu ve vašem projektu. Vložte blok EXEC/IODRV z Knihovny bloků (Block Library) a připojte jej k bloku EXEC, jak je znázorněno níže.
V TASKu odstraňte bloky CNB_SWITCH1 a CNB_SWITCH3 a nahraďte je bloky INOUT/From, což budou vstupní signály. Také přidejte jeden blok INOUT/Goto, který bude sloužit jako výstup a který bude řízen časovačem. Připomínáme, že nová větev čáry se vytváří tažením pravým tlačítkem myši.
Kapitola 4
Práce se vstupními a výstupními signály
Nyní řekneme kompilátoru, aby používal konkrétní ovladač I/O. K tomu je třeba upravit parametry bloku IODRV podle následujících kroků:
4.1 Obecné kroky pro všechny platformy
- Nastavte blok IODRV, aby komunikoval s příslušným modulem pro cílovou
platformu, upravením parametrů bloku:
- module=<název modulu>
- classname=<název třídy>
- cfgname – nastavte podle potřeby (viz níže).
- factor=1
- Ostatní parametry nechte beze změny.
- Přejmenujte blok IODRV podle doporučení pro jednotlivé platformy (např. WG pro WAGO, GPIO pro Raspberry Pi). Toto jméno bude zároveň prefixem pro všechny signály I/O tohoto ovladače.
- Pokud bude potřeba, vytvořte konfigurační soubor pro ovladač I/O. Klikněte na tlačítko Configure a vyplňte formulář podle potřeby. Poté klikněte na OK a soubor bude uložen do složky projektu.
- V blocích From a Goto nastavte parametr GotoTag pro vstupní/výstupní signály. Parametr GotoTag musí být ve formátu <prefix>__<název signálu>, kde prefix je název bloku IODRV. Všimněte si dvojitých znaků podtržení. Například WG__S1M430C1 pro kanál 1 modulu 750-430 v paměťovém slotu 1.
Na konci této Kapitoly by Váš projekt měl vypadat, jak je vidět na obrázku níže s tím, že jméno bloku IODRV a prefixy pro signály budou odpovídat platformě, kterou používáte.
4.2 Specifické parametry pro jednotlivé platformy
4.2.1 WAGO PFC100/200
- module=WagoDrv
- classname=WagoDrv
- cfgname – prázdné.
- Doporučené jméno IODRV a prefix pro signály: WG
Pro potřeby projektu nastavte pro bloky From parametry GotoTag jako:
- WG__S1M430C1 – První fyzický přepínač je připojen ke kanálu 1 (DI1) modulu 750-430, který je ve slotu 1.
- WG__S1M430C3 – Druhý fyzický přepínač je připojen ke kanálu 3 stejného modulu.
Kanál 1 modulu 750-530 ve slotu 2 bude sloužit jako řídicí signál pro externí relé. Nastavte tedy pro blok Goto (GotoTag = WG__S2M530C1).
DŮLEŽITÉ: Moduly pro rozdělení potenciálu neposkytují žádná data, proto nezabírají žádnou paměť a nepočítají se při číslování slotů modulů!
Podobně pro ostatní I/O můžeme použít následující vlajky:
- Goto, WG__S2M530C8 – kanál 8 modulu 750-530 ve slotu 2
- From, WG__S3M555C2 – kanál 2 modulu 750-555 ve slotu 3 (v tomto příkladu není přítomný)
- atd.
Podrobný popis ovladače I/O pro WAGO PFC100/200 je k dispozici v samostatném manuálu [3].
4.2.2 Raspberry Pi
- module=GpioDrv
- classname=GpioDrv
- cfgname=gpio.rio
- Doporučené jméno IODRV a prefix pro signály: GPIO
Nezapomeňte kliknout na tlačítko Configure. Tím vytvoříte výchozí soubor konfigurace s názvem (.rio). Pro Raspberry Pi 5 zadejte parametr GPIO Chip=gpiochip4. Pro starší verze GPIO Chip=gpiochip0. Poté zavřete dialog.
Pro potřeby projektu nastavte pro bloky From parametry GotoTag jako:
- GPIO__GPIO23UI – První fyzický přepínač bude připojen k GPIO#23, bude aktivován interní pull-up rezistor a logika vstupů bude invertována.
- GPIO__GPIO24UI – Druhý fyzický přepínač bude připojen k GPIO#24, bude aktivován interní pull-up rezistor a logika vstupů bude invertována.
Výstup časovače bude připojen k GPIO#25 a bude sloužit jako výstupní signál. Nastavte tedy pro blok Goto (GotoTag = GPIO__GPIO25).
Podobně pro ostatní piny můžeme použít následující vlajky:
- Goto, GPIO__GPIO22 – digitální výstup 22
- From, GPIO__GPIO7U – digitální vstup 7 s interním pull-up rezistorem
- From, GPIO__GPIO8D – digitální vstup 8 s interním pull-down rezistorem
- From, GPIO__GPIO21 – digitální vstup 21 bez pull-up/down rezistoru
Číslování pinů na Raspberry Pi B+ a novějších je zobrazeno na následujících
obrázcích: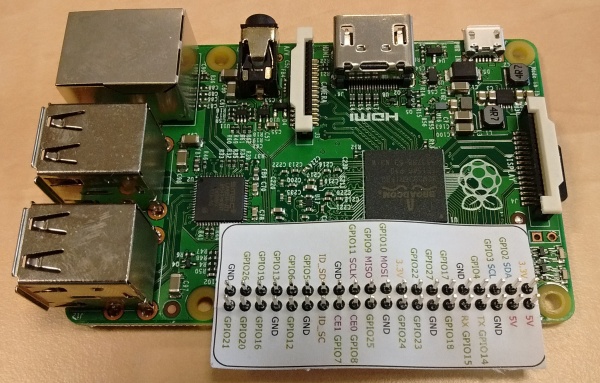
Navštivte stránku http://elinux.org/RPi_Low-level_peripherals pro podrobné informace o jednotlivých GPIO pinech.
4.2.3 Monarco HAT
- module=MonarcoDrv
- classname=MonarcoHatDrv
- cfgname=monarcohat.rio
- Doporučené jméno IODRV a prefix pro signály: MNR
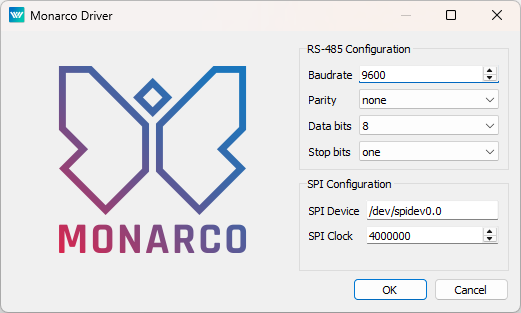
Nezapomeňte kliknout na tlačítko Configure. Tím vytvoříte výchozí soubor konfigurace s názvem (.rio). Ponechte výchozí hodnoty a zavřete dialog.
Pro potřeby projektu nastavte pro bloky From parametry GotoTag jako:
- MNR__DI1 – První fyzický přepínač je připojen k DI1.
- MNR__DI3 – Druhý fyzický přepínač je připojen k DI3.
Výstup časovače bude připojen k DO1 a bude sloužit jako výstupní signál. Nastavte tedy pro blok Goto (GotoTag = MNR__DO1).
Podobně pro ostatní piny můžeme použít následující vlajky:
- Goto, MNR__DO4 – digitální výstup 4
- From, MNR__DI3 – digitální vstup 3
- From, MNR__AI1 – analogový vstup 1
Podrobný popis ovladače I/O pro Monarco HAT je k dispozici v samostatném manuálu [4].
Pinout zařízení Monarco HAT je vyobrazen na následujícím obrázku:
4.2.4 REX M527, Unipi Patron/Axon/Neuron
- module=MBDrv
- classname=MtmDrv
- cfgname=patron_cfg.rio
- Doporučené jméno IODRV a prefix pro signály: PTN
Musíte vytvořit soubor patron_cfg.rio. Klikněte na tlačítko Configure a vyplňte formulář, jak je uvedeno níže. Poté klikněte na OK a soubor bude uložen do složky projektu.
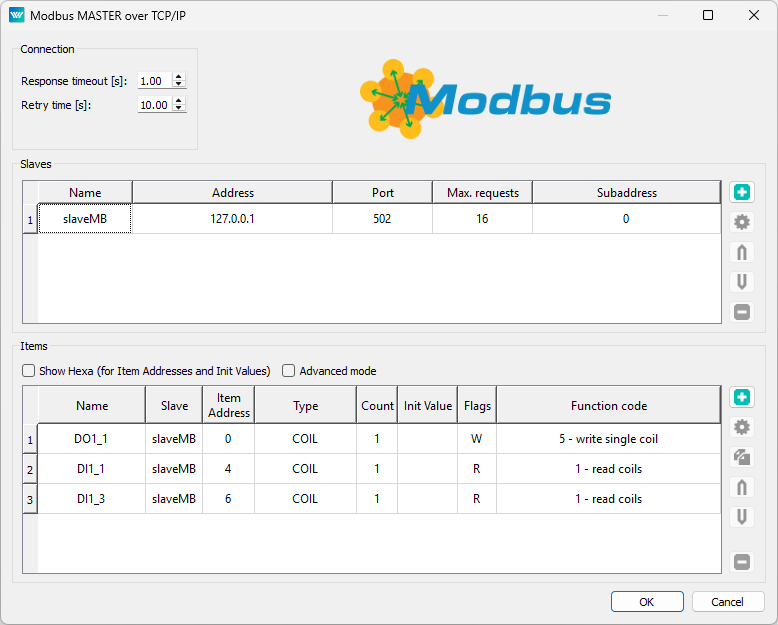
Pro potřeby projektu nastavte pro bloky From parametry GotoTag jako:
- PTN__DI1_1 – První fyzický přepínač je připojen k první skupině digitálních vstupů - vstup 1.
- PTN__DI1_3 – Druhý fyzický přepínač je připojen k digitálnímu vstupu 1.3.
Výstup časovače bude připojen k digitálnímu výstupu 1.1 a bude sloužit jako výstupní signál. Nastavte tedy pro blok Goto (GotoTag = PTN__DO1_1).
Všimněte si, že komunikace se zřízením probíhá pomocí protokolu Modbus TCP. Podrobný popis ovladače pro Modbus TCP je k dispozici v samostatném manuálu [5].
Poznámka: Pokud používáte starší Unipi Axon nebo Neuron, je nastavení stejné. Můžete pro přehlednost použít prefix AXN, resp. NRN místo PTN.
4.2.5 Weidmüller u-OS PLC (WL2000, M3000, M4000)
- module=UControlDrv
- classname=UControlDrv
- cfgname=weidmueller_cfg.rio
- Doporučené jméno IODRV a prefix pro signály: WM
Musíte vytvořit soubor weidmueller_cfg.rio. Klikněte na tlačítko Configure, v katalogu po pravé straně postupně vyberte I/O moduly, které máte připojené a naskládejte je za PLC v prostřední části ve správném pořadí. Poté klikněte na OK a soubor bude uložen do složky projektu.
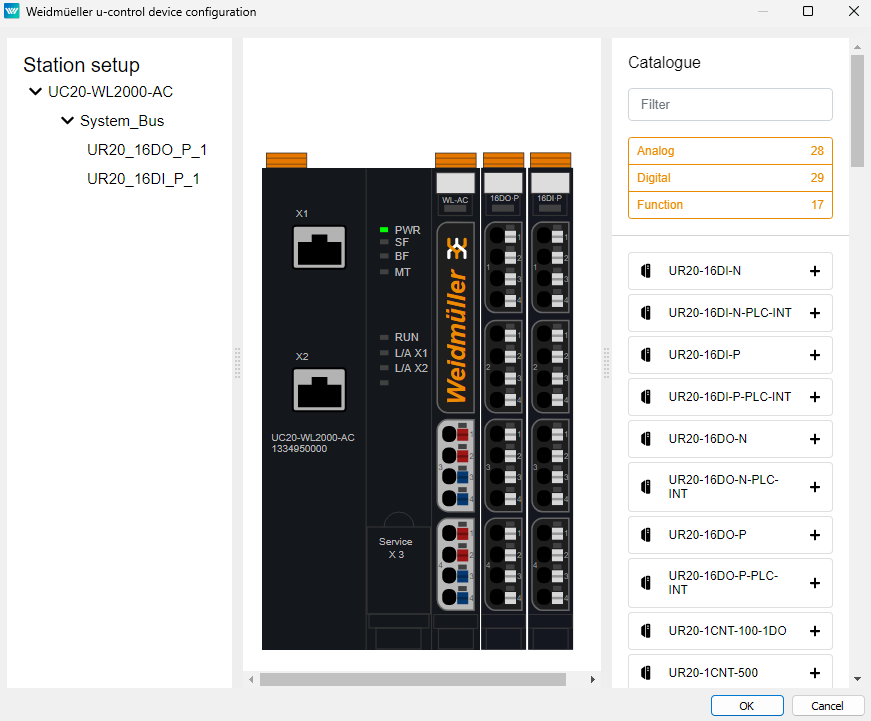
Nyní byste měli mít v Knihovně bloků připravenu novou knihovnu se jménem driveru, tedy WM. Uvnitř najdete vygenerované bloky From a Goto podle modulů, které jste přidali do konfigurace driveru. Vyberte From bloky:
- WM__UR20_16DI_P_1_Value_0 – První fyzický přepínač je připojen k modulu 16DI_P k prvnímu vstupu.
- WM__UR20_16DI_P_1_Value_1 – Druhý fyzický přepínač je připojen k modulu 16DI_P k druhému vstupu.
Výstup časovače bude připojen k modulu 16DO_P k prvnímu výstupu. Vyberte tedy pro blok WM__UR20_16DO_P_1_Value_0.
Kapitola 5
Interakce s algoritmem
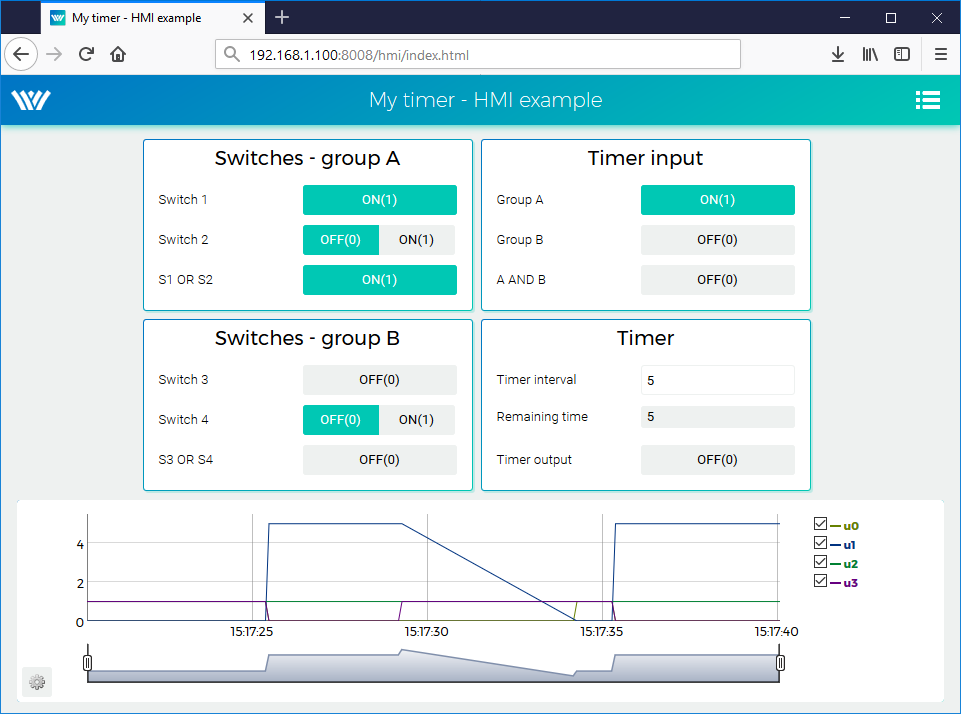
Po kompilaci projektu a jeho stažení na platformu interaguje řídicí algoritmus s fyzickým světem. Opět je možné přepnout do Watch mode a pozorovat signály v reálném čase nebo analyzovat trendy signálů. Přepněte fyzické přepínače a sledujte signály.
Kapitola 6
Aktualizace HMI
Je také nutné aktualizovat HMI. Bloky CNB_SWITCH1 a CNB_SWITCH3 již nejsou v algoritmu přítomné. Navíc je potřeba nahradit virtuální vstupní prvky (DW) indikátory (DR). Otevřete tedy soubor index.hmi.js a nahraďte
{type: 'DW', alias: 'switch1', desc: 'Spinac 1', cstring: 'myproject_task.CNB_SWITCH1:YCN'},
tímto
{type: 'DR', alias: 'switch1', desc: 'Spinac 1', cstring: 'myproject_task.OR_A:U1'},
Podobně pro přepínač č. 3, nahraďte
{type: 'DW', alias: 'switch3', desc: 'Spinac 3', cstring: 'myproject_task.CNB_SWITCH3:YCN'},
tímto
{type: 'DR', alias: 'switch3', desc: 'Spinac 3', cstring: 'myproject_task.OR_B:U1'},
Uložte soubor, zkompilujte a stáhněte projekt znovu a otevřete webové rozhraní. Stiskněte dva fyzické přepínače a čekejte, až časovač spustí výstup. Alternativně můžete stále používat virtuální přepínače. To ukazuje, že můžete kombinovat fyzické a virtuální vstupní prvky.
Kapitola 7
Příklady
Ukázkové projekty a sada všech podporovaných I/O vlajek jsou zahrnuty v instalačním
balíčku vývojových nástrojů REXYGEN. V REXYGEN Studio přejděte do nabídky
File
Start
Start from an Example Project a vyberte jeden z příkladů platformy. Jak již
bylo zmíněno, nejaktuálnější informace o příkladech jsou k dispozici
na
https://www.rexygen.com/example-projects/
Kapitola 8
Další kroky
Gratulujeme, vytvořili jste svůj první ukázkový projekt od začátku! Naučili jste se, jak vyvíjet, kompilovat a spouštět algoritmy na své platformě. Zvládli jste konfiguraci a práci s vstupně-výstupním ovladačem systému REXYGEN pro interakci se senzory a aktuátory. Také jste získali zkušenosti s tvorbou uživatelských rozhraní pomocí WebBuDi.
Impozantní pokrok za tak krátkou dobu, nemyslíte? Cílem těchto tutoriálů bylo rychle vás seznámit s klíčovými kroky a nástroji potřebnými k rozvoji projektů. Pro systém REXYGEN existuje také nástroj pro tvorbu vizualizací - REXYGEN HMI Designer [6], který je vhodný pro složitější vizualizace u větších projektů. Podrobnosti o tvorbě vizualizací v REXYGEN HMI Designer naleznete v samostatném manuálu [7].
Nyní je čas zaměřit se na svůj vlastní projekt a prohloubit své znalosti. Existují funkční bloky mnohem výkonnější než ty zmíněné v této příručce, mnoho inspirativních příkladových projektů a další vstupně-výstupní ovladače, které můžete využít k rozšíření vašeho projektu. Objevíte také různé způsoby výměny dat s externími systémy a zařízeními, a mnoho dalšího.
Pamatujte, že kdykoliv dosáhnete nějakého úspěchu, o který se chcete podělit, rádi si o něm poslechneme. A kdykoliv narazíte na nějaké potíže, rádi vám pomůžeme. Kontaktujte nás kdykoliv na support@rexygen.com.
Literatura
[1] REX Controls s.r.o.. První projekt, 2024. .
[2] REX Controls s.r.o.. Začínáme s řídicím systémem REXYGEN, 2024. .
[3] REX Controls s.r.o.. Ovladač WagoDrv systému REXYGEN pro Wago PFC100/PFC200 – Uživatelská příručka, 2020. .
[4] REX Controls s.r.o.. Ovladač MonarcoDrv systému REXYGEN – Uživatelská příručka, 2020. .
[5] REX Controls s.r.o.. Ovladač systému REXYGEN pro komunikaci Modbus – Uživatelská příručka, 2020. .
[6] REX Controls s.r.o.. REXYGEN HMI – Uživatelská příručka, 2024. .
[7] REX Controls s.r.o.. Tvorba HMI v REXYGEN HMI Designer, 2024. .
Referenční číslo dokumentace: 17331
2025 © REX Controls s.r.o., www.rexygen.com