You are not logged in.
- Topics: Active | Unanswered
Announcement
REXYGEN forum has been moved. This one is closed.
Head over to the new REXYGEN Community Forum at https://forum.rexygen.com.
Looking forward to meeting you there!
- Index
- » Input/Output drivers, target devices, software and hardware integration (v2.50)
- » Rexduino counter problem
Pages: 1
Topic closed
#1 2018-12-11 11:46:16
- bodie
- Member
- Registered: 2016-12-19
- Posts: 10
Rexduino counter problem
Hello,
I am using Rexduino (*.mdl file and three *.ino files from github) in Rexygen and I have problem with counter. I set the pinmode2 to Encoder A, pinmode4 to Encoder B and connected CNB with state on to CNT2E. The incremental encoder is connected to Arduino UNO board, measuring the DC motor. When I set the PWM for motor to constant value, it runs quite constantly. But the output from Arduino UNO mask, CNT2, is updating irregularly.

I checked comm_status, it is 3 without changes. I also tried to increase baudrate from 57600 to 115200 (in REX and Arduino), but without any help. The program runs on Raspberry Pi 1 B+, ticks 0.005 and ntick0 for used task is 2 (so periode of mz task is 10 ms).
Thanks for your help.
Offline
#2 2018-12-13 08:42:27
- jaroslav_sobota
- Administrator

- Registered: 2015-10-27
- Posts: 535
Re: Rexduino counter problem
Hi Bodie,
thanks for the detailed description of the problem. Three questions on my mind:
Did you also check the err_code and err_subcode outputs? I guess there will be some nonzero values.
Can you try rotating the encoder with your hand to avoid noise generated by the motor? Does the problem still occur in such a case?
What is the average and maximum execution time of your task?
Kind regards,
Jaroslav
Monarco HAT for Raspberry Pi - Lightweight I/O for monitoring, archiving and control.
Raspberry Pi in industrial automation!
Offline
#3 2018-12-13 11:30:34
- bodie
- Member
- Registered: 2016-12-19
- Posts: 10
Re: Rexduino counter problem
Hi Jaroslav,
I checked err_code and err_subcode and there were zeros.
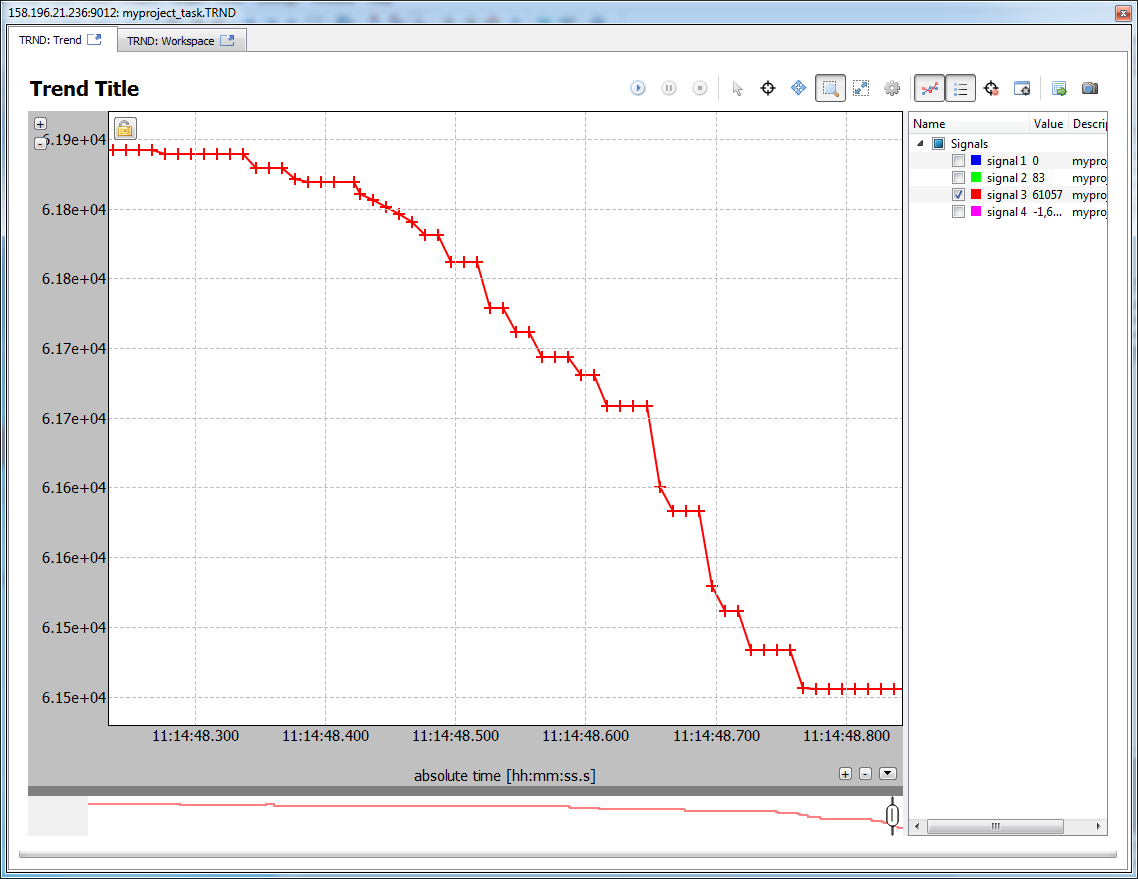
I tried to rotate it manually, but i am not sure if I was able to rotate it with constant speed. Still problems with counter value, see attached picture.
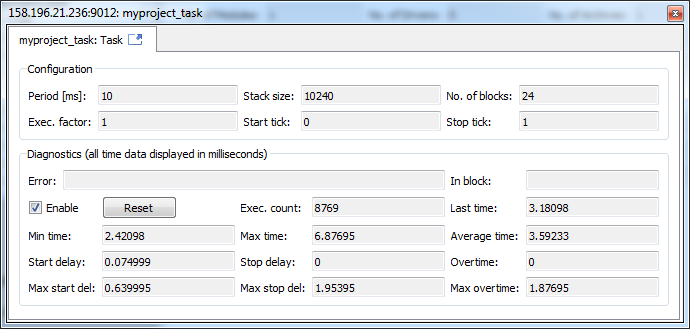
I also attached diagnostic window screen, average time was 3.59 ms and maximum 6.87 ms.
Regards
Bodie
Offline
#4 2018-12-13 13:16:27
- tomáš čechura
- Administrator

- Registered: 2016-02-22
- Posts: 371
Re: Rexduino counter problem
Hi Bodie,
just to be sure: did you check trend of err_code and err_subcode? Can you also check userRecv output of Arduino subsystem? It should show Arduino internal time.
Regards, Tomas
Offline
#5 2018-12-13 13:56:31
- bodie
- Member
- Registered: 2016-12-19
- Posts: 10
Re: Rexduino counter problem
Hi Tomas,
Yes, as you wrote, I checked it in trend.
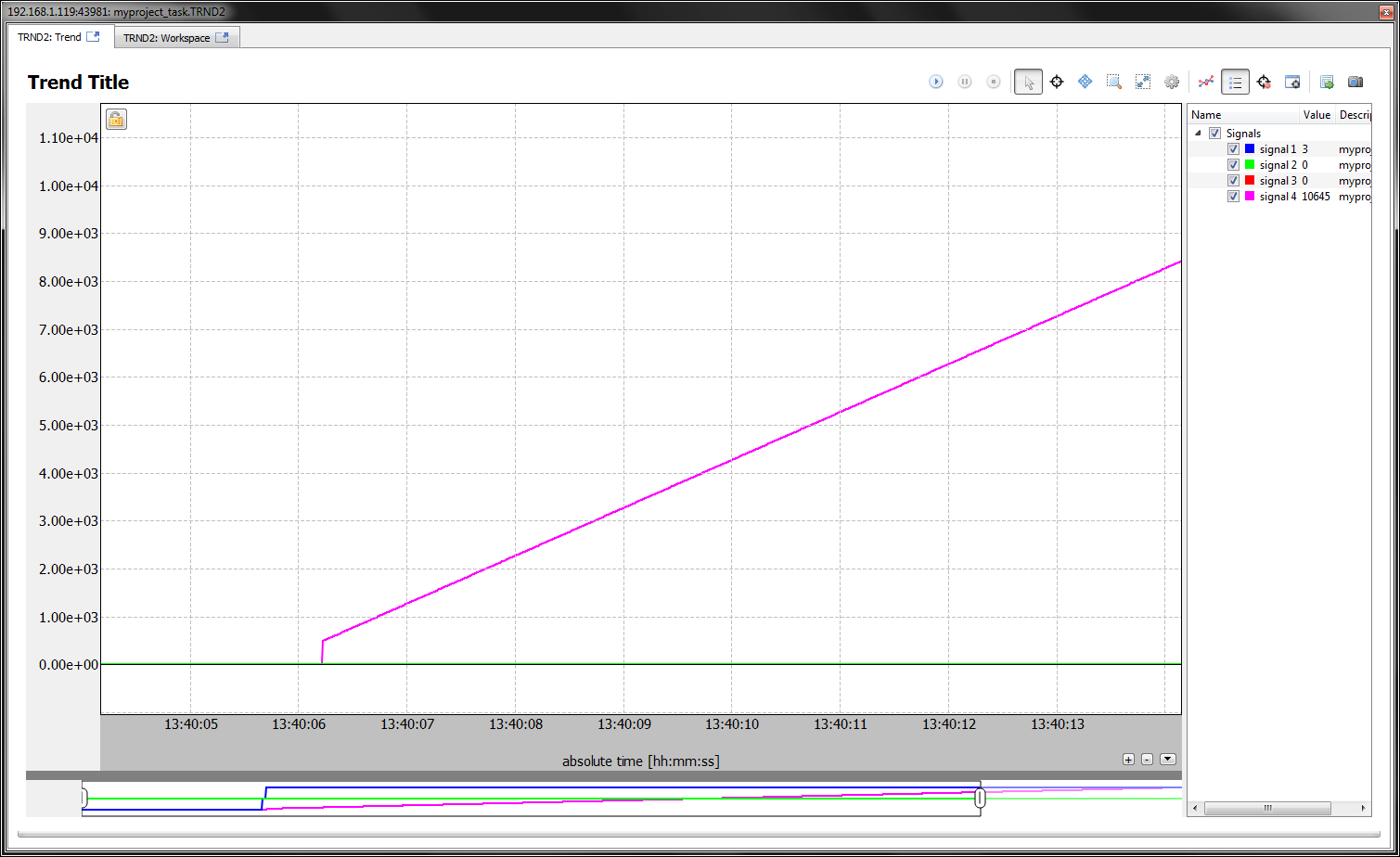
The userRecv trend is attached, looks like it is rising linearly.
Regards
Bodie
Offline
#6 2018-12-17 11:09:17
- jaroslav_sobota
- Administrator
- Registered: 2015-10-27
- Posts: 535
Re: Rexduino counter problem
Hi Bodie,
this will need a thorough analysis, at the moment I do not see any potential cause of the problem. Can you please try running your algorithm on a Raspberry Pi 3 and check if the problem persists?
Best regards,
Jaroslav
Monarco HAT for Raspberry Pi - Lightweight I/O for monitoring, archiving and control.
Raspberry Pi in industrial automation!
Offline
Pages: 1
Topic closed